Hadoop 1.x 的 Secondary NameNode,和 Hadoop 2.x 的 NameNode HA。
NameNode
NameNode主要是用来保存HDFS的元数据信息,比如命名空间信息,块信息等。当它运行的时候,这些信息是存在内存中的。但是这些信息也可以持久化到磁盘上。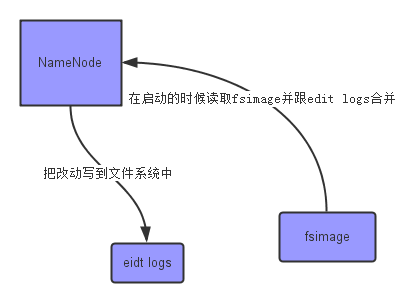
上面的这张图片展示了NameNode怎么把元数据保存到磁盘上的。这里有两个不同的文件:
- fsimage - 它是在NameNode启动时对整个文件系统的快照
- edit logs - 它是在NameNode启动后,对文件系统的改动序列
只有在NameNode重启时,edit logs才会合并到fsimage文件中,从而得到一个文件系统的最新快照。但是在产品集群中NameNode是很少重启的,这也意味着当NameNode运行了很长时间后,edit logs文件会变得很大。在这种情况下就会出现下面一些问题:
- edit logs文件会变的很大,怎么去管理这个文件是一个挑战。
- NameNode的重启会花费很长时间,因为有很多改动[笔者注:在edit logs中]要合并到fsimage文件上。
- 如果NameNode挂掉了,那我们就丢失了很多改动因为此时的fsimage文件非常旧。
为了克服这个问题,需要一个易于管理的机制来帮助我们减小edit logs文件的大小和得到一个最新的fsimage文件,这样也会减小在NameNode上的压力。这跟Windows的恢复点是非常像的,Windows的恢复点机制允许我们对OS进行快照,这样当系统发生问题时,我们能够回滚到最新的一次恢复点上。
现在我们明白了NameNode的功能和所面临的挑战 - 保持文件系统最新的元数据。那么,这些跟Secondary NameNode又有什么关系呢?
Secondary NameNode
SecondaryNameNode就是来帮助解决上述问题的,它的职责是合并NameNode的edit logs到fsimage文件中。
下面我们来看一下SecondaryNameNode工作的流程,如下图: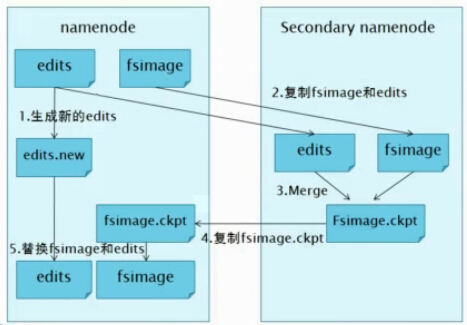
1.NameNode管理着元数据信息,元数据信息会定期的刷到磁盘中,其中的两个文件是edits即操作日志文件和fsimage即元数据镜像文件,新的操作日志不会立即与fsimage进行合并,也不会刷到NameNode的内存中,而是会先写到edits中(因为合并需要消耗大量的资源)。当edits文件的大小达到一个临界值(默认是64MB)或者间隔一段时间(默认是1小时)的时候checkpoint会触发SecondaryNameNode进行工作。
2.当触发一个checkpoint操作时,NameNode会生成一个新的edits即上图中的edits.new文件,同时SecondaryNameNode会将edits文件和fsimage复制到本地。
3.Secondary NameNode将本地的fsimage文件加载到内存中,然后再与edits文件进行合并生成一个新的fsimage文件即上图中的Fsimage.ckpt文件。
4.SecondaryNameNode将新生成的Fsimage.ckpt文件复制到NameNode节点。
5.在NameNode结点的edits.new文件和Fsimage.ckpt文件会替换掉原来的edits文件和fsimage文件,至此,刚好一个轮回即在NameNode中又是edits和fsimage文件了。
6.等待下一次checkpoint触发Secondary NameNode进行工作,一直这样循环操作。
说明:新生成的edits.new应该是一个空文件,此时若Name Node元信息出现了改动,则会被写入到edits.new中。
Secondary NameNode的整个目的是在HDFS中提供一个检查点。它只是Name Node的一个助手节点。这也是它在社区内被认为是检查点节点的原因。现在,我们明白了Secondary NameNode所做的不过是在文件系统中设置一个检查点来帮助NameNode更好的工作。它不是要取代掉NameNode也不是NameNode的备份。所以从现在起,让我们养成一个习惯,称呼它为检查点节点吧。
Secondary NameNode是hadoop1.x中HDFS HA的一个解决方案,在实际的生产系统中只能减少系统宕机时丢失的数据量,减少系统重启时间,但是并不能降低NameNode宕机风险。在hadoop2.x中都是采用NameNode HA的解决方案!
Import Checkpoint(恢复数据)
如果主节点挂掉了,硬盘数据需要时间恢复或者不能恢复了,现在又想立刻恢复HDFS,这个时候就可以import checkpoint。步骤如下:
- 拿一台和原来机器一样的机器,包括配置和文件,一般来说最快的是拿你节点机器中的一台,立马能用(部分配置要改成NameNode的配置)
- 创建一个空的文件夹,该文件夹就是配置文件中dfs.name.dir所指向的文件夹。(或者删除 namenode主节点的metadata配置目录)
- 拷贝你的secondary NameNode checkpoint出来的文件,到某个文件夹,该文件夹为fs.checkpoint.dir指向的文件夹
- 执行命令bin/hadoop namenode -importCheckpoint
这样NameNode会读取checkpoint文件,保存到dfs.name.dir。但是如果你的dfs.name.dir包含合法的fsimage,是会执行失败的。因为NameNode会检查fs.checkpoint.dir目录下镜像的一致性,但是不会去改动它。
NameNode HA(高可用)
在hadoop 1.x 中NameNode存在一个单点故障问题,也就是说如果NameNode所在的机器发生故障,那么整个集群就将不可用(hadoop1中有个SecorndaryNameNode,但是它并不是NameNode的备份,它只是namenode的一个助理,协助namenode工作,对fsimage和edits文件进行合并,并推送给NameNode,防止因edits文件过大,导致NameNode重启变得很慢),这是hadoop1的不可靠实现。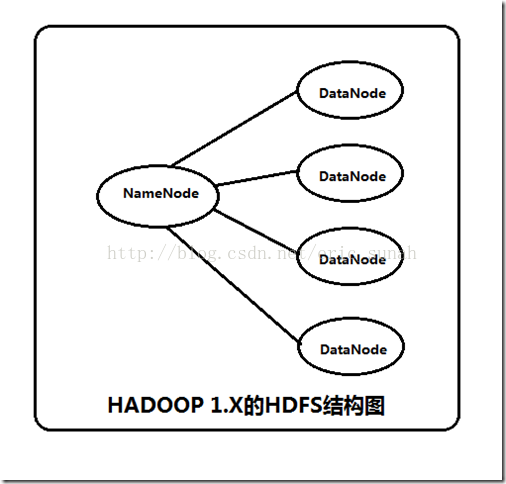
在Hadoop2中这个问题得以解决,Hadoop2中的高可靠性是指同时启动NameNode,其中一个处于active工作状态,另外一个处于随时待命standby状态。这样,当一个NameNode所在的服务器宕机时,可以在数据不丢失的情况下, 手工或者自动切换到另一个NameNode提供服务。
这些NameNode之间通过共享数据,保证数据的状态一致。多个NameNode之间共享数据,可以通过Network File System或者Quorum Journal Node。前者是通过Linux共享的文件系统,属于操作系统的配置;后者是Hadoop自身的东西,属于软件的配置。
我们这里讲述使用Quorum Journal Node的配置方式,方式是手工切换。
集群启动时,可以同时启动2个NameNode。这些NameNode只有一个是active的,另一个属于standby状态。active状态意味着提供服务,standby状态意味着处于休眠状态,只进行数据同步,时刻准备着提供服务,如下图所示。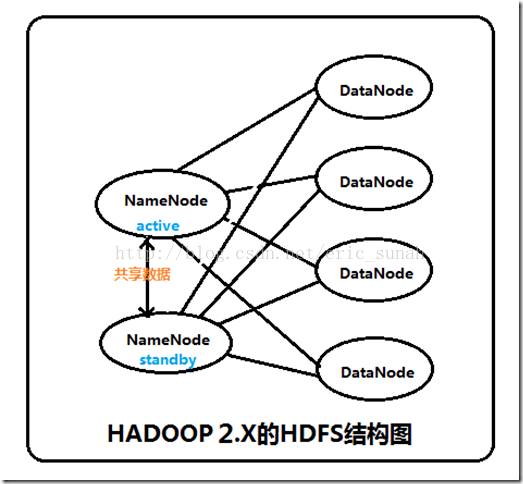
架构
在一个典型的HA集群中,每个NameNode是一台独立的服务器。在任一时刻,只有一个NameNode处于active状态,另一个处于standby状态。其中,active状态的NameNode负责所有的客户端操作,standby状态的NameNode处于从属地位,维护着数据状态,随时准备切换。
两个NameNode为了数据同步,会通过一组称作JournalNodes的独立进程进行相互通信。当active状态的NameNode的命名空间有任何修改时,会告知大部分的JournalNodes进程。standby状态的NameNode有能力读取JNs中的变更信息,并且一直监控edit log的变化,把变化应用于自己的命名空间。standby可以确保在集群出错时,命名空间状态已经完全同步了,如下图所示。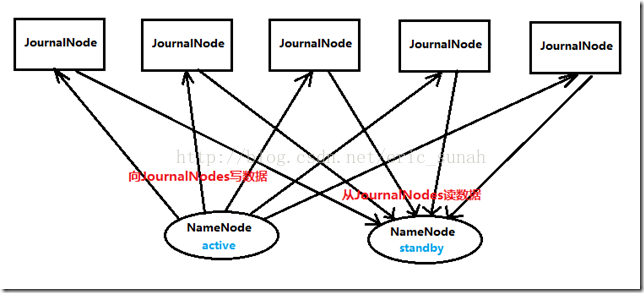
为了确保快速切换,standby状态的NameNode有必要知道集群中所有数据块的位置。为了做到这点,所有的datanodes必须配置两个NameNode的地址,发送数据块位置信息和心跳给他们两个。
对于HA集群而言,确保同一时刻只有一个NameNode处于active状态是至关重要的。否则,两个NameNode的数据状态就会产生分歧,可能丢失数据,或者产生错误的结果。为了保证这点,JNs必须确保同一时刻只有一个NameNode可以向自己写数据。
硬件资源
为了部署HA集群,应该准备以下事情:
- NameNode服务器:运行NameNode的服务器应该有相同的硬件配置。
- JournalNode服务器:运行的JournalNode进程非常轻量,可以部署在其他的服务器上。注意:必须允许至少3个节点。当然可以运行更多,但是必须是奇数个,如3、5、7、9个等等。当运行N个节点时,系统可以容忍至少(N-1)/2个节点失败而不影响正常运行。
在HA集群中,standby状态的NameNode可以完成checkpoint操作,因此没必要配置Secondary NameNode、CheckpointNode、BackupNode。如果真的配置了,还会报错。